L'eMotronic, quésaco ?
Introduction
La carte eMotronic conçue par eMotion Tech permet le pilotage d’une machine numérique grâce au firmware Smoothieware. Celle-ci utilise le même jeu d'instructions "Gcode" que l'on peut retrouver dans la plupart des imprimantes 3D et commandes numériques (avec des variations suivant les constructeurs). L'idée de cette carte est de proposer une solution souple, puissante, réparable et dédiée autant à des machines qu'a du prototypage.
Caractéristiques principales
- Microcontrôleur de type ARM Cortex M3 cadencé à 100Mhz (NXP LPC1768)
- Alimentation : 12V ou 24V divisible en deux lignes distinctes (10A et 15A dédié à un lit chauffant)
- Contrôle moteur : 5 pilotes pas à pas Allegro A4982 (maximum 2A par phase)
- Stockage et configuration firmware sur une carte Micro SD
- Entrées :
- Mini-USB filtré pour un port série virtuel stable et périphérique de stockage de masse (accès à la carte SD)
- 4 entrées de fin de course
- 1 entrée jack ou 3 pins opto-couplée intégrée pour un capteur inductif/capacitif
- 3 entrées température
- Sorties :
- 4 sorties de puissance (dont une sortie dédiée au lit chauffant (maximum 15A))
- 2 sorties de faible puissance de 1A max (dédié aux ventilateurs ou LED)
- Les ports d’extensions :
- 2 ports d’extension pour des sous-cartes (par exemple LCD, LED faible intensité, host embarqué, etc…) (Comprenant 2x I2C, SPI, UART,1x PWM, 1x ADC).
- 1 port spécifique pour une sous-carte Ethernet
- Un port d'extension de puissance comprenant 2 E/S température pour un contrôle déporté de 2 parties chauffantes et 2 sorties faible intensité (pour ventilateur, LED, etc)
- Protections :
- Fusible 10A et protection de polarité sur la ligne principale
- Fusible 15A sur la ligne dédiée au lit chauffant
- Fusibles PTC sur 5V logique et 3.3V logique
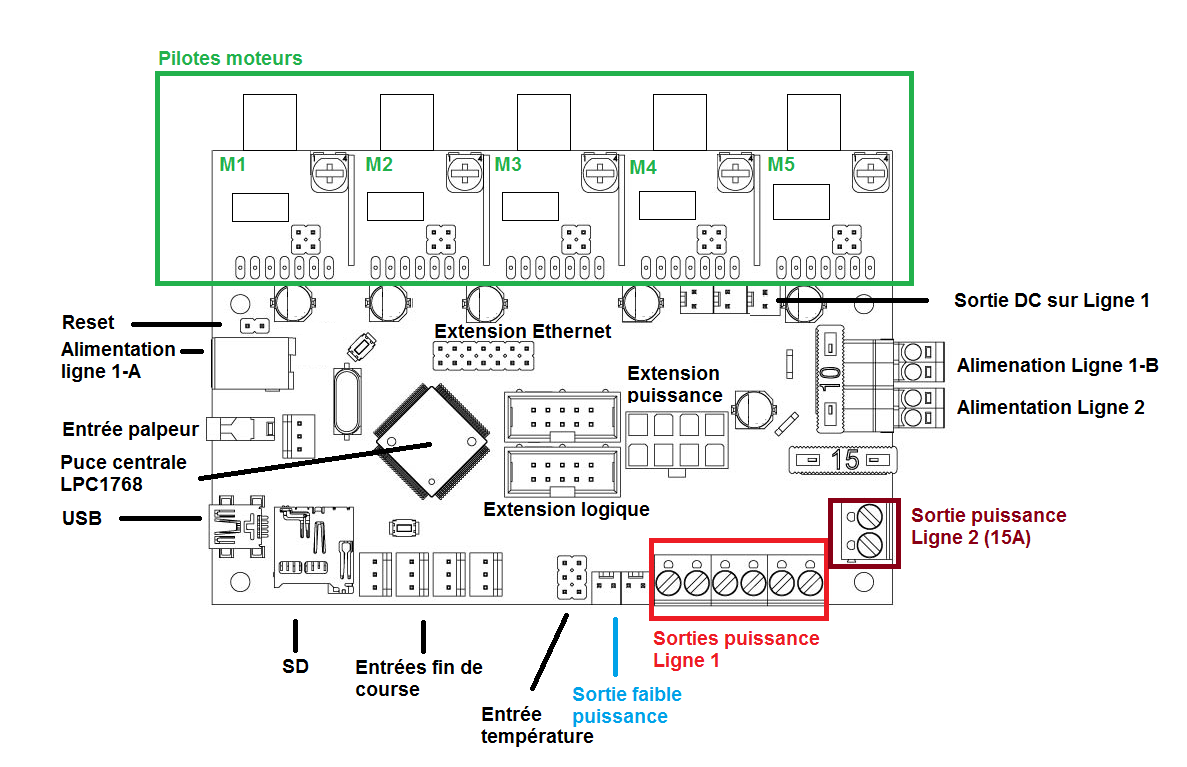
Câblage de la carte
1. Alimentation
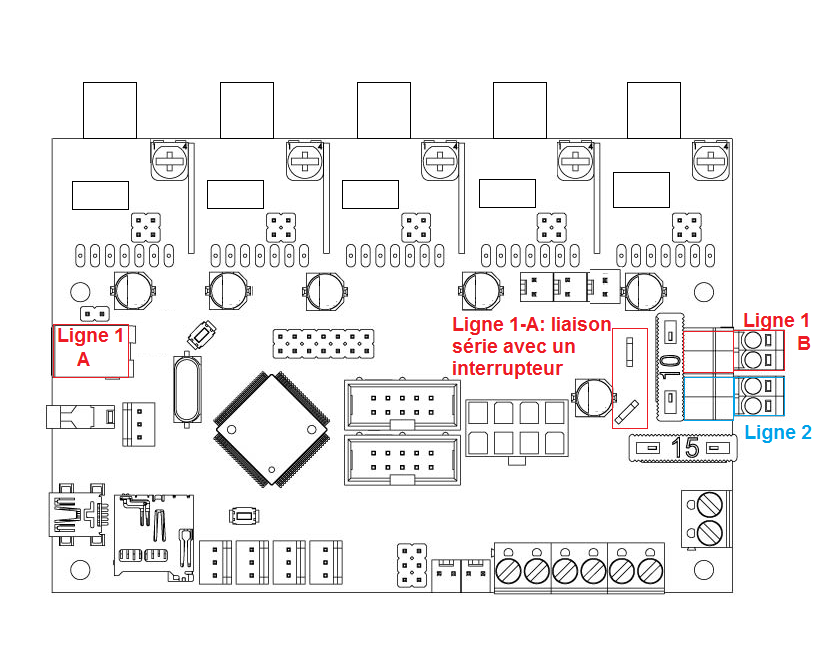
L’alimentation est divisée en 2 lignes distinctes :
- la ligne 1 composée d’un bornier en série avec un fusible 10A. Cependant l’entrée DC est doublée avec un deuxième connecteur jack 5.5x2.5mm en série avec 2 lamelles dédiés à un interrupteur pour faciliter une connexion en façade.
- la ligne 2 est protégée par fusible 15A et est principalement utile dans le cas d’un plateau chauffant qui nécessiterait plus de 10A (cas fréquent dans le cas d’une utilisation sous 12V).
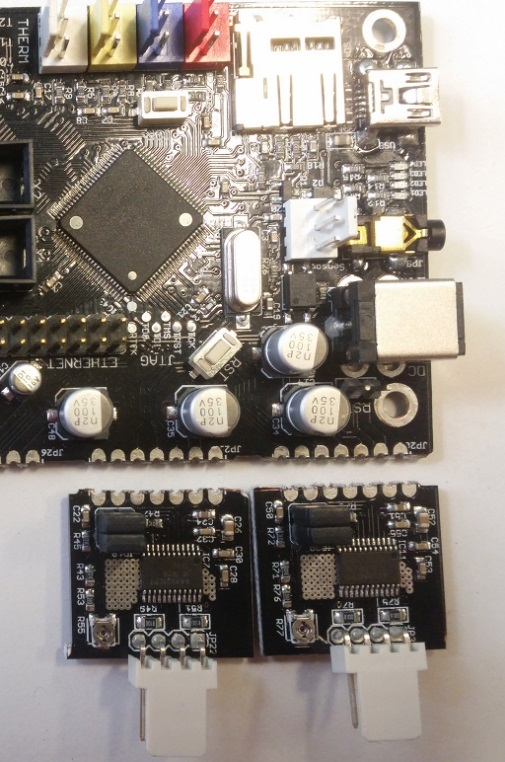
2. Les pilotes de moteurs pas à pas
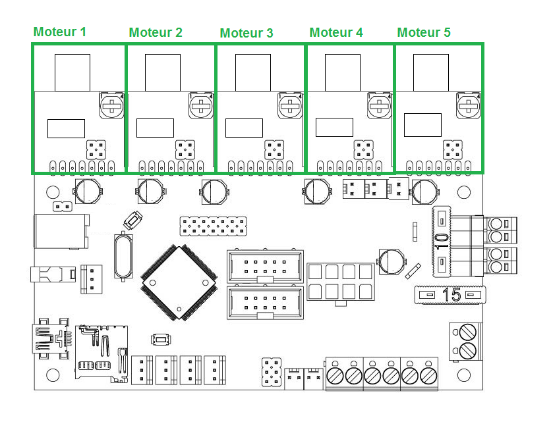 Les pilotes moteurs sont basés sur les puces Allegro A4982 et peuvent supporter jusqu’à 2A par phase à condition d’avoir un refroidissement correct. Pour la plupart des applications utilisant des NEMA17 (le format de moteur le plus commun dans les imprimantes 3D) 1.5A est largement suffisant.
Les pilotes moteurs sont basés sur les puces Allegro A4982 et peuvent supporter jusqu’à 2A par phase à condition d’avoir un refroidissement correct. Pour la plupart des applications utilisant des NEMA17 (le format de moteur le plus commun dans les imprimantes 3D) 1.5A est largement suffisant.
L’eMotronic a la particularité d’avoir des pilotes moteurs intégrés. Cette solution a pour avantage d’éviter les erreurs de débutant lors des branchements des pilotes indépendants tout en baissant les coûts pour une carte plus abordable. Cependant nous avons fait le choix de diviser les contrôleurs moteurs en unités indépendantes afin de pouvoir les réparer en cas de panne.
Réglage du courant
Le courant admissible dans les deux bobinages du moteur est réglable par le potentiomètre en bord de carte.
Note : le réglage par défaut correspond aux besoins d’un moteur NEMA17 sur une imprimante 3D, il n’est donc pas nécessaire dans une configuration standard d’y toucher.
Note 2 : beaucoup d’utilisateurs utilisent la tension aux bornes du potentiomètre pour en déduire le courant maximal en se référant aux cartes indépendantes de type stepstick et Pololu A4988. Cependant la tension logique (ici 3.3V), ainsi que les résistances diffèrent de celles-ci. Les tensions de références seront donc différentes que sur les Stepstick en 5V.
Microstepping
| Cavalier MS1 | Cavalier MS2 | Stepping |
| OFF | OFF | Plein pas |
| ON | OFF | 1/2 pas |
| OFF | ON | 1/4 pas |
| ON | ON | 1/16 pas |
Les règles de calcul de pas
Prenons l’exemple d’un moteur avec une résolution initiale de 200 pas par tour (1.8°/pas).
Le microstepping permet de multiplier la résolution (cf bibliographie pour les détails). Un moteur soumit à un microstepping de 1/16 donnera une résolution de 16*200 = 3200 pas (ou plutôt pas électrique) par tour.
Bibliographie :
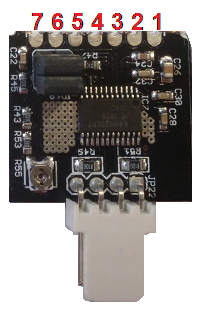
3. Entrée sur le contrôleur moteur
|
Pin |
Nom |
Fonction |
|
1 |
GND |
Masse |
|
2 |
VMOT (12-24V) |
Alimentation puissance provenant de la ligne 1 |
|
3 |
DIR |
Direction (Direction du pas moteur) |
|
4 |
!EN |
Activation du contrôleur moteur (signal bas pour activer le pilote) |
|
5 |
STEP |
Pas |
|
6 |
VLogic (3.3V) |
Alimentation logique provenant de la carte |
|
7 |
GND |
Masse |
Note : il est aussi possible d’utiliser ces sorties intermédiaires pour connecter un pilote moteur externe.
|
Nom |
Moteur |
Numéro de pin logiciel |
|
STEP |
1 |
2.0 |
|
DIR |
1 |
3.26 |
|
!EN |
1 |
3.25 |
|
STEP |
2 |
2.1 |
|
DIR |
2 |
0.22 |
|
!EN |
2 |
0.21 |
|
STEP |
3 |
2.2 |
|
DIR |
3 |
4.28 |
|
!EN |
3 |
4.29 |
|
STEP |
4 |
2.3 |
|
DIR |
4 |
0.4 |
|
!EN |
4 |
0.3 |
|
STEP |
5 |
2.8 |
|
DIR |
5 |
0.20 |
|
!EN |
5 |
0.19 |
4. Sorties de puissance
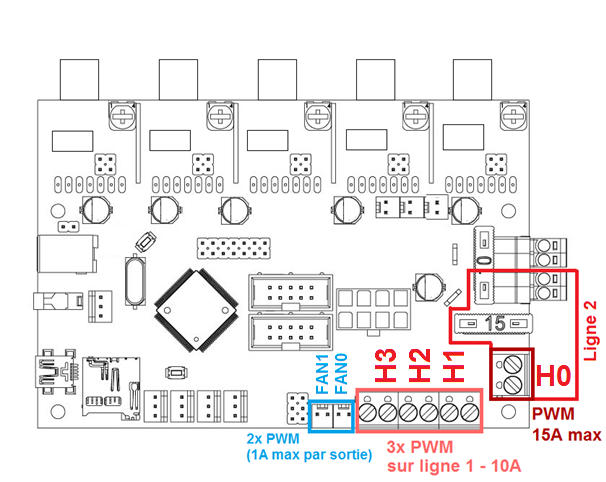
Trois types de sorties PWM sont présentes :
- 1x sortie PWM très forte puissance spécialement dédiée aux lits chauffant (15A max)
- 3x sortie PWM fortes puissances dédiés aux parties chauffantes utilisant la ligne 1 dont la somme doit faire moins de 10A
- 2x sortie PWM faible puissance (1A max par sortie) dédiés aux ventilateurs, LED, etc (sur ligne 1)
|
Pin |
Fonction |
Ligne de puissance |
Courant max |
Numéro de pin logiciel |
|
H0 |
(Heater 0) Sortie PWM Lit chauffant |
2 |
15A |
2.4 |
|
H1 |
Sortie PWM forte puissance |
1 |
10A cumulé |
2.5 |
|
H2 |
Sortie PWM forte puissance |
1 |
10A cumulé |
2.6 |
|
H3 |
Sortie PWM forte puissance |
1 |
10A cumulé |
2.7 |
|
FAN0 |
Sortie PWM faible puissance |
1 |
1A |
2.11 |
|
FAN1 |
Sortie PWM faible puissance |
1 |
1A |
2.13 |
5. Les entrées de fin de course
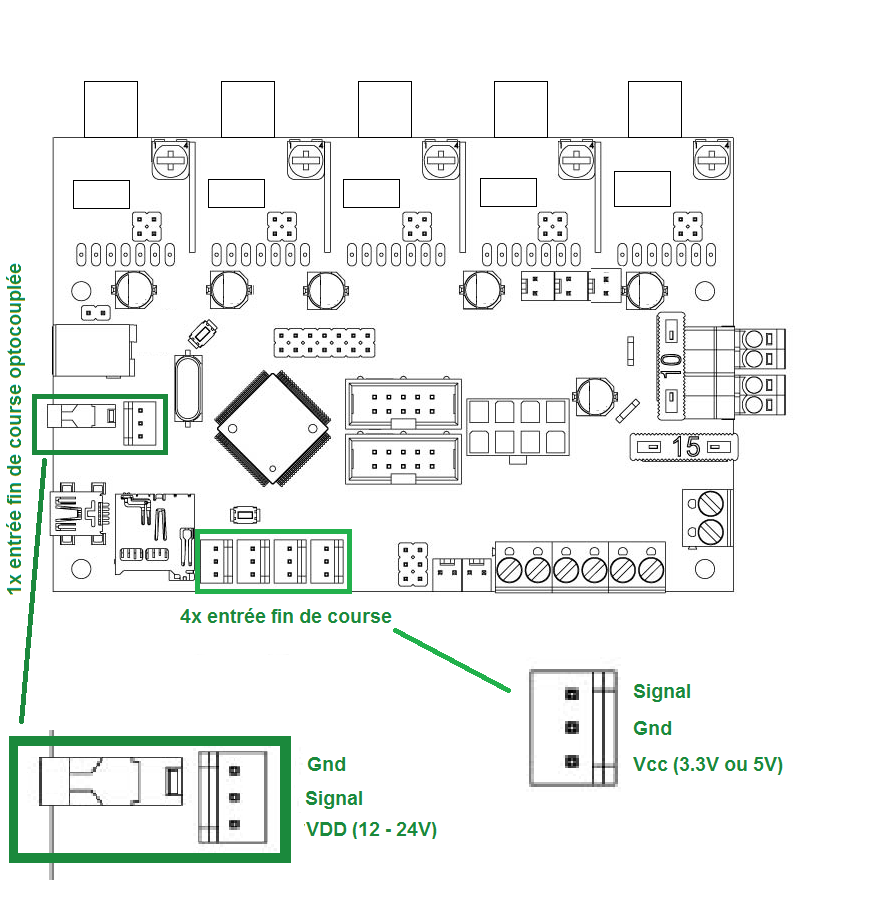
Les entrées de fin de course vous permettront d’appliquer une référence absolue à vos mouvements.
Les 4 entrées de fin de course peuvent être associées à un axe dans le fichier de configuration.
Note: une soudure sélectionnera la tension attribuée aux connecteurs (3.3V et 5V)
|
Pin |
Fonction |
Numéro de pin logiciel |
|
S0/X_MIN |
(Sensor 0) Fin de course logique |
1.22 |
|
S1/Y_MIN |
Fin de course logique |
1.23 |
|
S2/Z_MIN |
Fin de course logique |
1.24 |
|
S3/E_MIN |
Fin de course logique |
1.25 |
|
S4/S_SIN |
Fin de course optocouplée |
0.26 |
L’entrée optocouplée permet d’utiliser des capteurs de type inductif et capacitif qui ont besoin de hautes tensions pour fonctionner. Il n’est pas recommandé de mélanger les lignes de puissances avec celle de logique, en conséquent une entrée optocouplée est nécessaire afin de protéger la ligne logique de toute surtension.
6. Entrées analogiques
Les entrées analogiques permettent l’utilisation de thermistance.
3 entrée en températures peuvent être couplées avec des éléments de chauffe afin d’assurer une régulation.
3 entrée en températures peuvent être couplées avec des éléments de chauffe afin d’assurer une régulation.
|
Pin |
Fonction |
Numéro de pin logiciel |
|
TH0 |
Thermistance 0 |
0.23 |
|
TH1 |
Thermistance 1 |
0.24 |
|
TH2 |
Thermistance 2 |
0.25 |
Bibliographie :
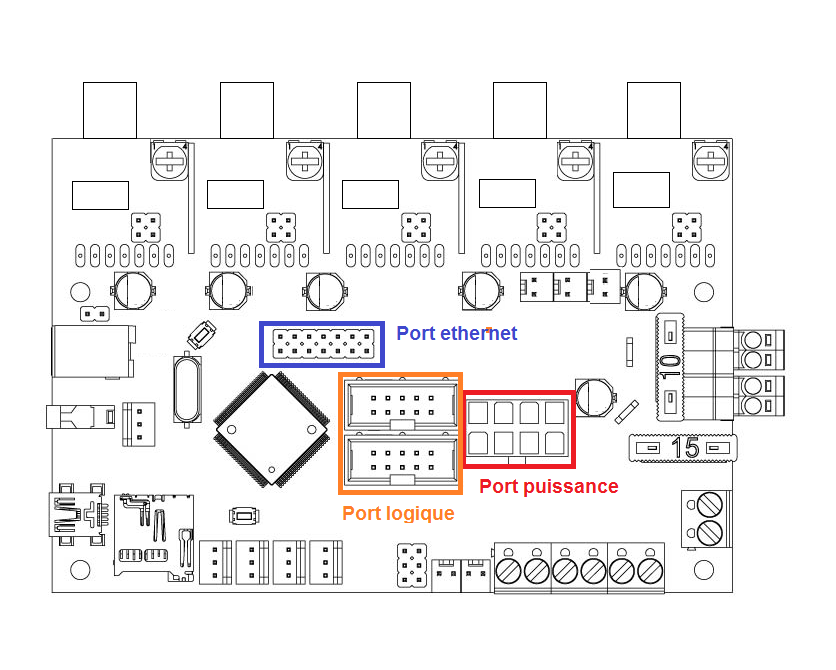
7. Les ports d’extensions
Afin de maximiser l’utilisation de la carte et de garder une taille de carte polyvalente, de multiples ports d’extensions sont disponibles.
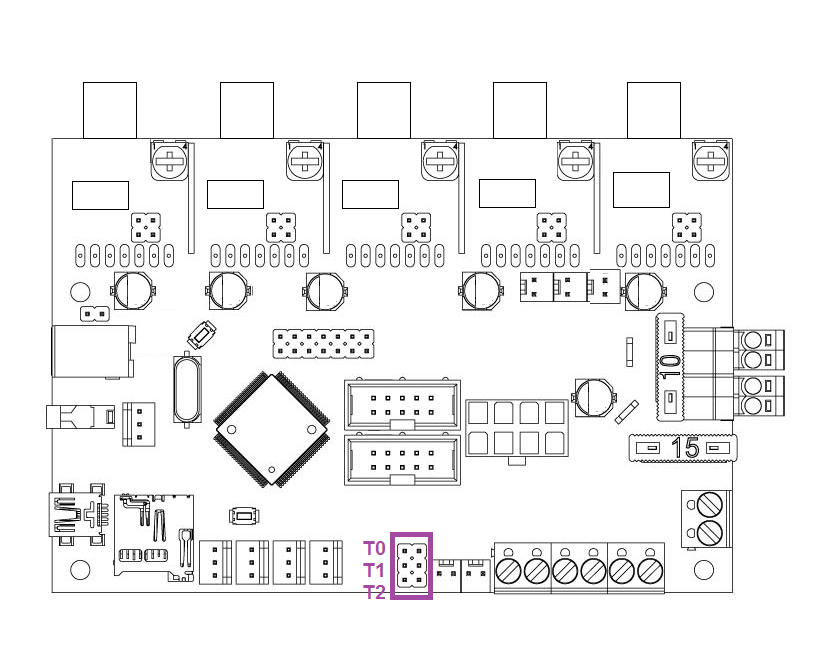
LE PORT D’EXTENSION PUISSANCE
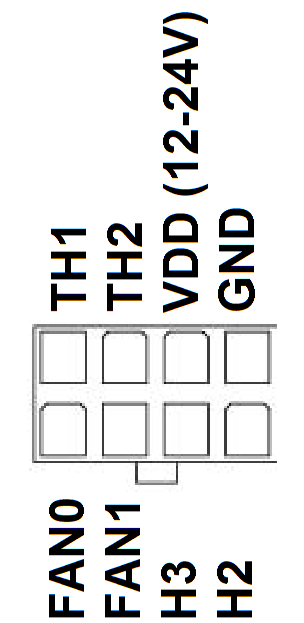 Le port puissance permet de connecter des parties chauffantes régulées à la prise Molex MiniFit.
Le port puissance permet de connecter des parties chauffantes régulées à la prise Molex MiniFit.
|
Pin |
Fonction |
Numéro de pin logiciel |
|
TH1 |
Thermistance 1 |
0.24 |
|
TH2 |
Thermistance 2 |
0.25 |
|
VDD |
Alimentation de puissance |
|
|
GND |
Masse |
|
|
FAN0 |
PWM faible puissance 0 |
2.11 |
|
FAN1 |
PWM faible puissance 1 |
2.13 |
|
H3 |
Heater 3 (PWM forte puissance 3) |
2.7 |
|
H2 |
Heater 2 (PWM forte puissance 2) |
2.6 |
Le port d’extension logique
Ce port permet de brancher des cartes d’extension de type logique comme des écrans de contrôle, LED, modules d’acquisitions, etc…
Note: Vous retrouverez l'attribution des pins à l'arriere de l'eMotronic.
Le port d’extension ethernet
Ce port permet de brancher à posteriori une carte d’extension Ethernet.
8. SOURCES et Licence
Vous trouverez les sources eagle dans notre onglet support section sources et datasheet.
L'eMotronic est sous Licence publique générale GNU (GPL)
9. Allez plus loin et configurez-la
Un autre article sera prochainement dédié à la configuration de cette carte. En attendant vous pouvez regarder le fonctionnement du firmware sur le site Smoothieware dont la programmation reste très flexible et accessible via l'édition d'un simple fichier texte.
Auteur de l'article: Hugo